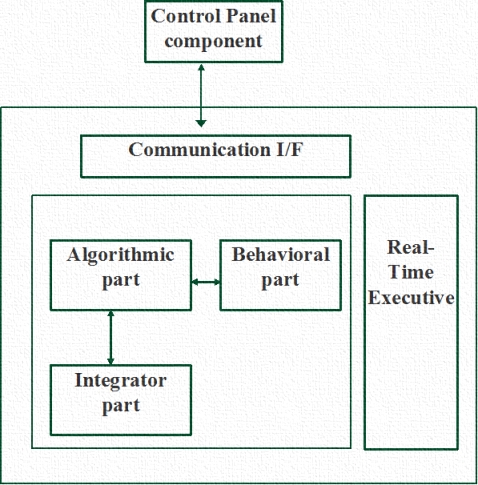
Algorithmic Part
This part implements an algorithm of the control flow :
- Input data
- Output data / events
- User defined code
- Temporal constraints
- Trajectory Generator
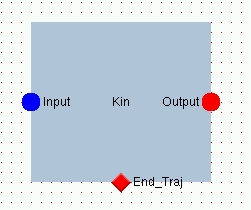
- Direct - Inverse Kinematics
- Jacobian
- Control
Initial Specification
This part implements an algorithm of the control flow :
- Input data
- Output data / events
- User defined code
- Temporal constraints
- Trajectory Generator
- Direct - Inverse Kinematics
- Jacobian
- Control