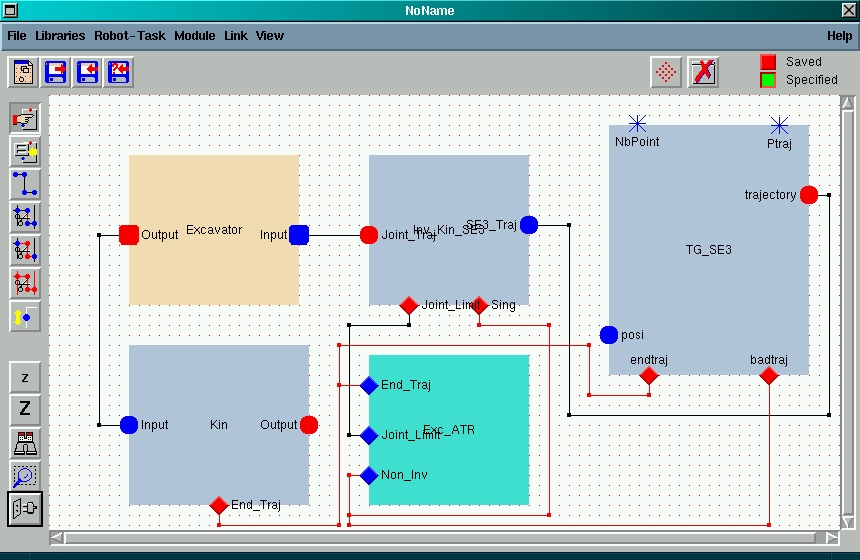
Robot Tasks
Implements an elementary robotic action
- move in Joint Space
- move in Cartesian Space
- Implemented as a set of interconnected modules
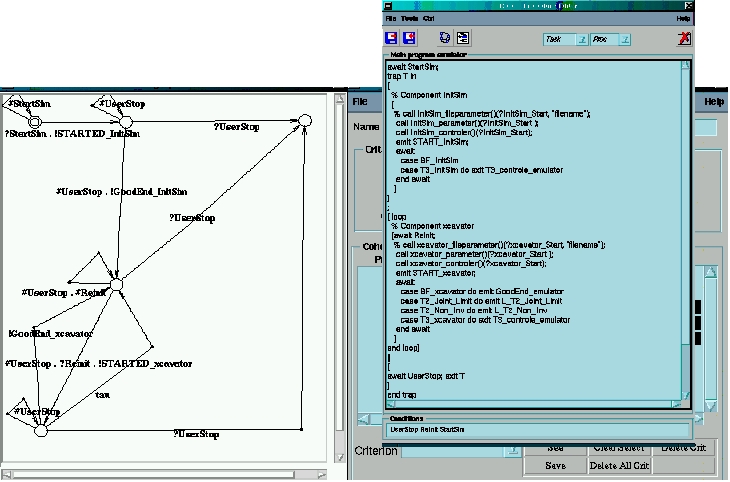
Behavioral Part
Implements the logical behavior of the task/application
- Reactive model (finite state machines)
- Input / Output events
- Esterel formal language
- Compiled on 'C' code
await USRSTART_simulation;
[
loop
[
await START_MoveAbsJoints;
emit MoveAbsJoints(params);
await Collision; emit CollisionDet
await GoodEnd_MoveAbsJoints
]
||
.<other Robot-Tasks>
||
[
await START_MoveCartesian;
emit MoveCartesian(params);
await Collision; emit CollisionDet
await GoodEnd_MoveCartesian
]
||
[
await USRSTOP_simulation; exit
]
end loop