Environment Recognition Use Case : DEM
As a result of the participation in several research projects, Synapse has developed a series of environment recognition techniques.One of them resulted to DEM, a software module that is reusable for different types of applications. After basic hardware calibration on the host robotic system, standard tests and small scale changes to the input/output interfaces, DEM is ready to provide real time data to be used from other modules for collision detection, 3D visualisation |
Calibration data and real time data are stored in the system database, in standard SQL or proprietary file format. figure : DEM in action,reading data for indoor environment recognition |
|
|---|
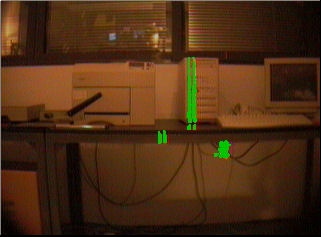
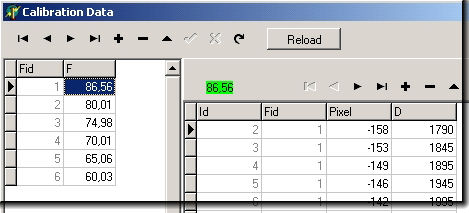
figure : calibration data |
|
|---|
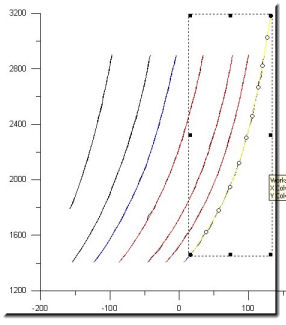
After the hardware calibration and camera / laser setup, DEM plots are exported to finalise the environment matching procedures. The plots can give a simple visual verification of the system proposed "best fit" functions for the specific application. The algorithms used for calculation and recognition can be changed by the user. After the formula tests, the system can proceed to the first sampling. |
|
|---|
Acquisition has full results in daytime or with pure light available. |
|
|---|
