
Scan-Bot - Specifications
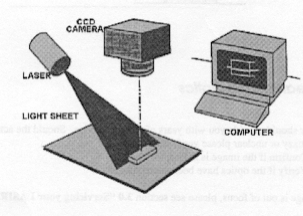
Principle of operation using a laser line pointer
The principle idea in reconstructing shape from binocular vision is to match the point pairs (xL,yL) and (xR,yR)
of the two images, which are projections of a scene point A and find the required distances.
Nevertheless, there is a quite complex problem, that of which points can be correctly and robustly matched.
This is called the Stereo Correspondence Problem (SCP) and has attracted a great deal of research in the machine vision community.
Functional Requirements
- Off-line calibration of each individual camera using a special-purpose calibration object
- Off- line calibration of the pan-tilt mechanism associated with each camera using the same calibration object
- Off-line calibration of the stereo pair using the calibration object
- On-line calibration update of the stereo pair
- 3D triangulation allowing to compute the x,y,z coordinates of a point in a camera-centered frame and elevation map-building
Performance Requirements
- The overall philosophy of the perception software is that it is an non-real-time system
- The 3D Reconstruction s/w will produce maps with 5mm precision at +/-3 meters distance, for a distant frame of 2 m x 1.5m
- Other requirements: The camera choice should take into account the precision requirements
- Point extraction performance : min 200 points /line
Estimating Distances
Matching points in the two images is a very complex task due to the high degree of ambiguities introduced by the pp
geometry and the illumination conditions.
The SCP is rendered considerably difficult by the fact that some object points will give rise to points in one
image but not the other, due to occlusions effects as shown in Highly distorted figures make potential matches
overly cumbersome. As exemplified in , ambiguous correspondences between the two images may lead to several
consistent interpretations of the scene .
Such may be useful geometrical constraints, dependent to the shape of the objects being seen, for example
polyhedral objects. Various assumptions are also introduced to the SCP solution approaches, such as the one
referring to the smoothness of the surface function, i.e. that the distance of objects to the imaging system
varies slowly almost everywhere apart from depth discontinuities.
Conclusions
The non-structured type of the environment to be used in applications cannot guarantee matching algorithm
success for over 30 points /scene.
Such limited guaranteed performance obliges for the introduction of additional pointing system, such as line lasers.
Integrated prototype specifications
The integrated prototype has the following specifications
- Distance range of Target point from excavator edge : 1.2 to 2.5m
- Size of Target points at full range : Screen of 2.5m x 1.2m
- Measuring range 1200 to 4000mm, Accuracy L/680 (For L the screen length at the specific distance)